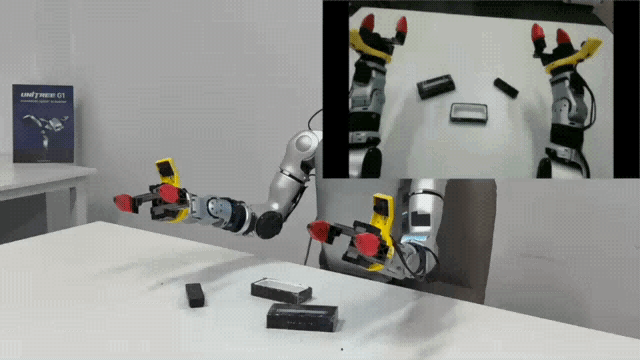
Descrição da ferramenta: UnifoLM-WMA-0 é um framework de código aberto que integra modelos de mundo e ações, permitindo que robôs de uso geral compreendam e interajam fisicamente com seus ambientes de forma eficiente.
Atributos:
🧠 Modelagem de Mundo: Capacidade de criar representações internas do ambiente para facilitar a compreensão e navegação.
🤖 Ações Físicas: Permite que os robôs executem ações físicas baseadas em percepções ambientais.
🔓 Código Aberto: Disponível publicamente, promovendo colaboração e melhorias contínuas na comunidade.
🌐 Integração Flexível: Compatível com diferentes plataformas e sistemas robóticos.
📊 Aprendizado Contínuo: Suporta atualização e aprimoramento do modelo através de novas experiências.
Exemplos de uso:
🛠️ Desenvolvimento de Robôs Gerais: Facilita a criação de robôs capazes de realizar múltiplas tarefas em ambientes diversos.
🎮 Simulação de Interações: Permite testar comportamentos robóticos em ambientes virtuais antes da implementação física.
🔍 Análise Ambiental: Utilizado para mapear e entender espaços complexos por meio do modelo interno do robô.
🤝 Interação Humano-Robô: Melhora a compreensão do ambiente para interações mais seguras e eficientes com humanos.
🚀 Pilotos Automáticos Adaptativos: Desenvolve sistemas autônomos capazes de ajustar suas ações conforme o ambiente muda.