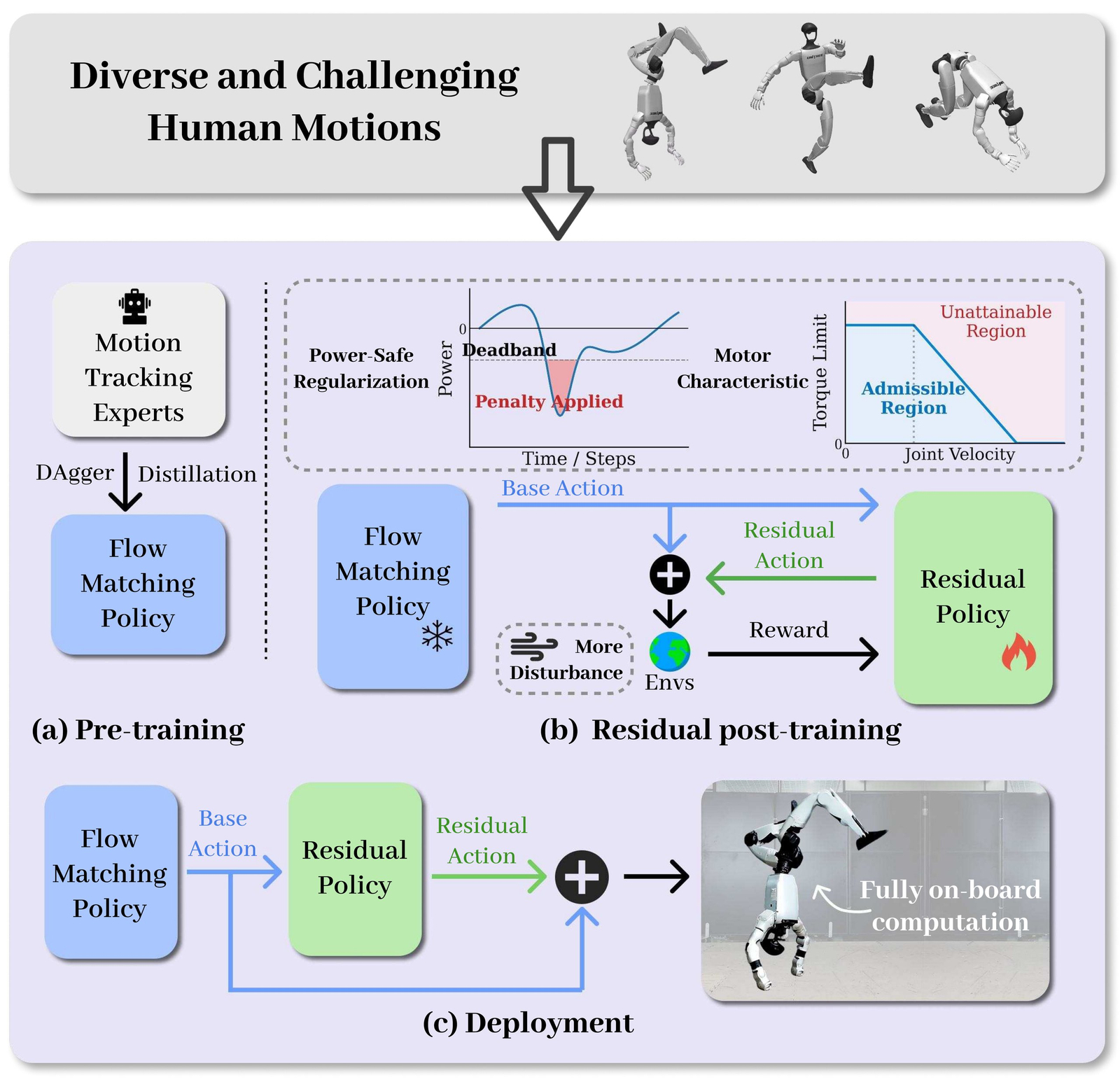
Descrição da ferramenta: OmniXtreme é um framework de controle de código aberto que impulsiona humanos artificiais a limites hiperhumanos, combinando planejamento de movimento extremo com proteção física para evitar sobrecarga dos motores durante operações complexas.
Atributos:
🔧 Controle de Código Aberto: Permite personalização e adaptação do framework conforme necessidades específicas.
⚙️ Planejamento de Movimento Extremo: Utiliza técnicas avançadas para gerar movimentos complexos e precisos.
🛡️ Proteção Física: Implementa clipping rigoroso do envelope físico para prevenir danos aos componentes mecânicos.
🤖 Foco em Humanoides: Projetado especificamente para controlar unidades humanoides como o Unitree G1.
🌐 Compatibilidade Open-Source: Disponível na plataforma GitHub, facilitando integração e colaboração na comunidade.
Exemplos de uso:
🚶♂️ Simulação de Locomoção Complexa: Controle avançado para movimentação fluida em ambientes desafiadores.
🎯 Percurso de Alta Precisão: Planejamento preciso para tarefas que exigem movimentos delicados ou exatos.
🛠️ Aprimoramento de Robôs Humanoides: Desenvolvimento e testes de controladores mais eficientes e seguros.
🔥 Evitamento de Sobrecarga dos Motores: Implementação do clipping físico para evitar quebras durante operações intensas.
🤝 Cobertura Colaborativa em Projetos Open-Source: Participação na comunidade global aprimorando o framework com melhorias contínuas.